 官方微博
官方微博
 官网微信
官网微信
 网站地图
官方微博
官网微信
网站地图
网站地图
官方微博
官网微信
网站地图

 当前位置:首页 > 新闻资讯 > 行业资讯行业资讯
当前位置:首页 > 新闻资讯 > 行业资讯行业资讯 发布时间:2024-04-19 11:45:06
发布时间:2024-04-19 11:45:06
 发布者:管理员
发布者:管理员
 浏览次数:45次
浏览次数:45次
 分享到:
分享到:
重型桁架机器人是一种广泛应用于工业生产线上的高精度、高效率的自动化设备,其工作原理主要基于先进的机械结构设计、传感器技术和控制系统。其在各个工业领域的应用案例充分展示了其在提高生产效率、降低劳动强度和提升产品质量方面的巨大潜力。

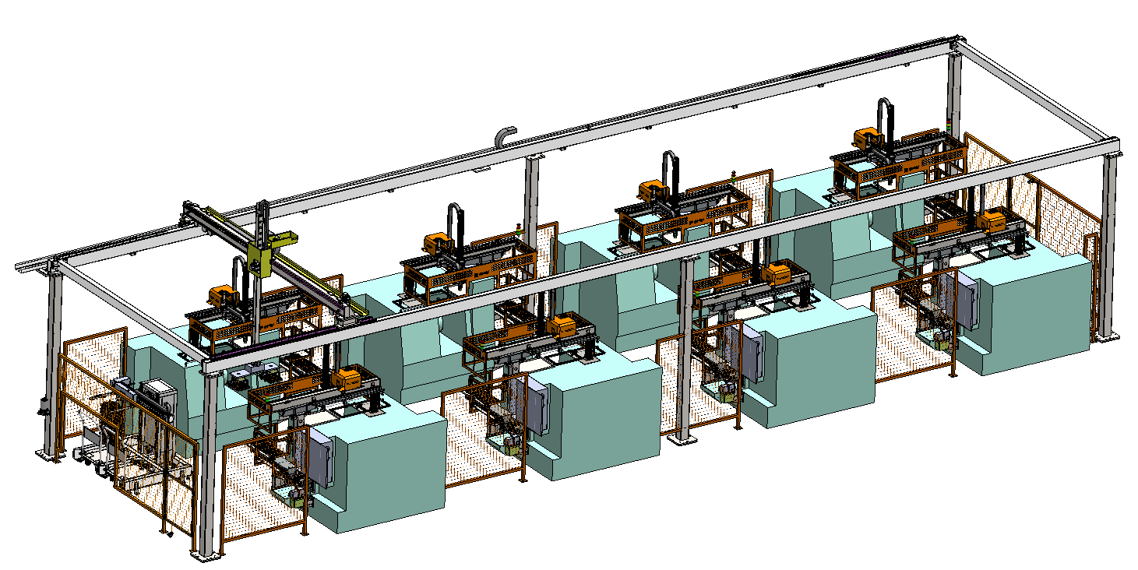
首先,这款机器人的机械结构是其工作的基础。桁架结构通常由高强度钢材焊接而成,具有极高的刚性和稳定性。机器人的运动部分主要由伺服电机、减速器和传动机构组成,这些部件协同工作,使机器人能够实现高速、高精度的运动。此外,桁架机器人还配备了各种夹具、传感器和执行器等装置,以满足不同生产需求。
在传感器技术方面,这款机器人采用了多种传感器,如位置传感器、力传感器、视觉传感器等。这些传感器能够实时感知机器人的运动状态、工作环境以及工件的状态等信息,并将这些信息反馈给控制系统。控制系统根据反馈信息进行实时调整,确保机器人能够按照预设的程序出色地完成各项任务。
控制系统是核心部分。它通常由高性能计算机、运动控制器和编程语言等组成。控制系统通过编程语言和运动控制器实现对机器人的控制。编程语言使得操作人员可以方便地编写机器人的运动轨迹、动作顺序以及与其他设备的协同工作等。运动控制器则负责将编程语言生成的运动指令转换为伺服电机的驱动信号,从而实现对机器人的控制。
总之,重型桁架机器人通过先进的机械结构设计、传感器技术和控制系统实现了高精度、高效率的自动化生产。未来随着技术的不断进步和创新,它将在工业生产中发挥更加重要的作用。
发布时间:2024-04-19 11:45:06
发布时间:2024-04-19 11:45:06

发布时间:2024-04-19 11:45:06
发布时间:2024-04-19 11:45:06

周一~周日:9:00-18:00


关注官方公众号

访问手机网站

